
Orginalartikel vom 28.06.2022
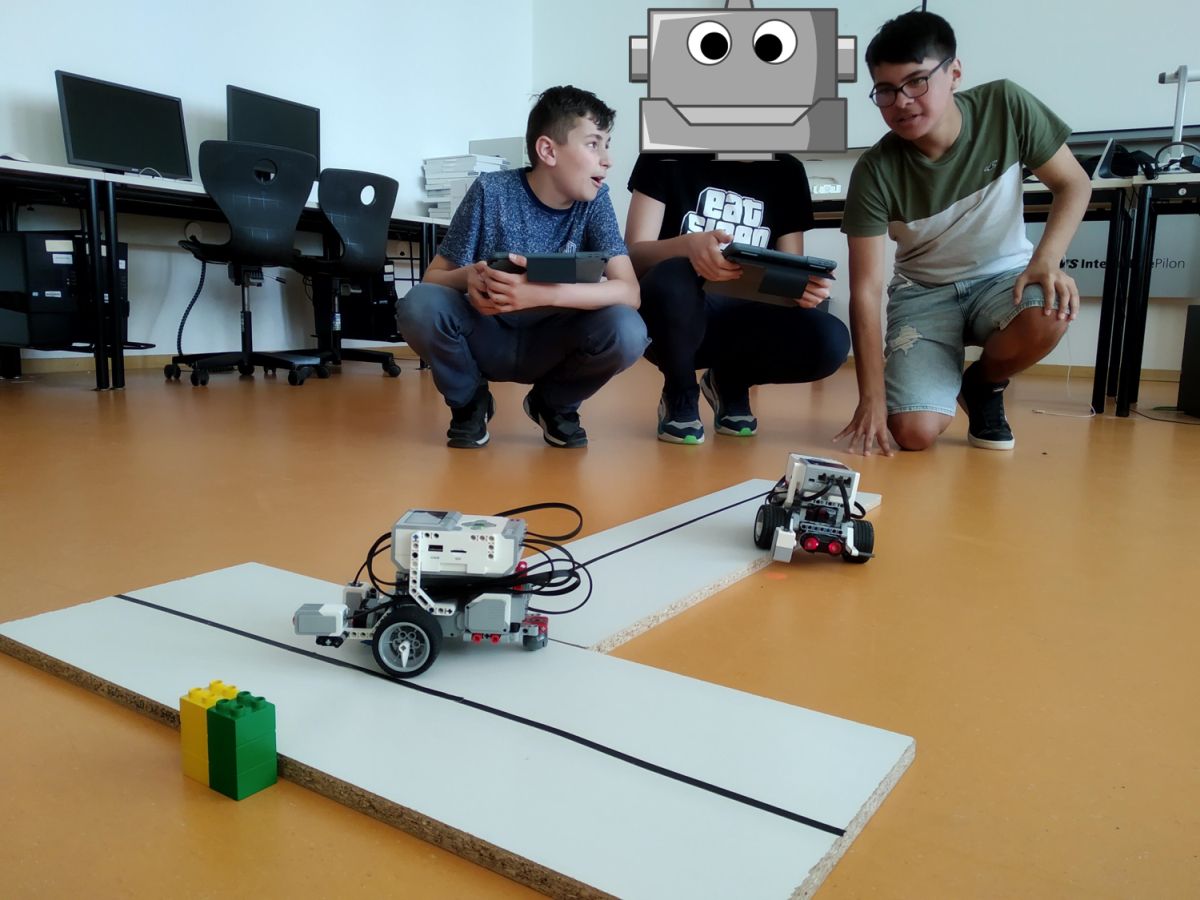
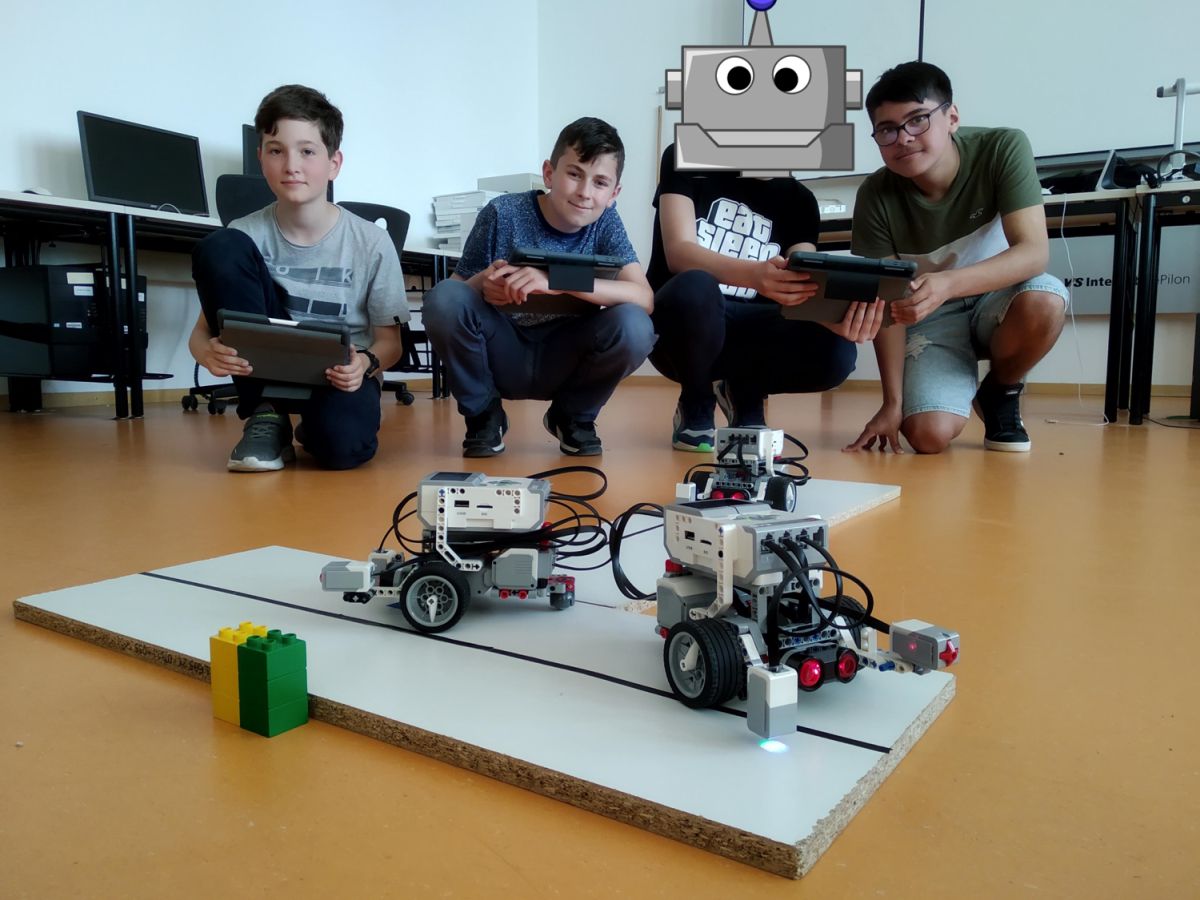
Die Robotor sind mittlerweile in der Lage selbstständig einer schwarzen Linie zu folgen. Dies ist schwieriger als man im ersten Moment denkt. Mit Hilfe der Werte des Lichtsensors entscheidet sich der Roboter, ob er sich nun ein wenig nach links oder rechts bewegen soll. So "hangelt" sich der Roboter der schwarzen Linie entlang. Im nächsten Schritt gilt es den Code so zu verbessern, dass der Roboter schneller fährt, aber trotzdem weiterhin die steilen Kurven schafft.
Auch wenn es nicht jedes Mal auf Anhieb gelingt, so lernen die Schüler stets etwas Neues dazu, denn - wie bei jedem Programmierer - gilt es nun Fehler zu finden, das Programm oder die Hardware entsprechend anzupassen.
Sobald diese Hürde genommen war, kamen wir zu Level 2:
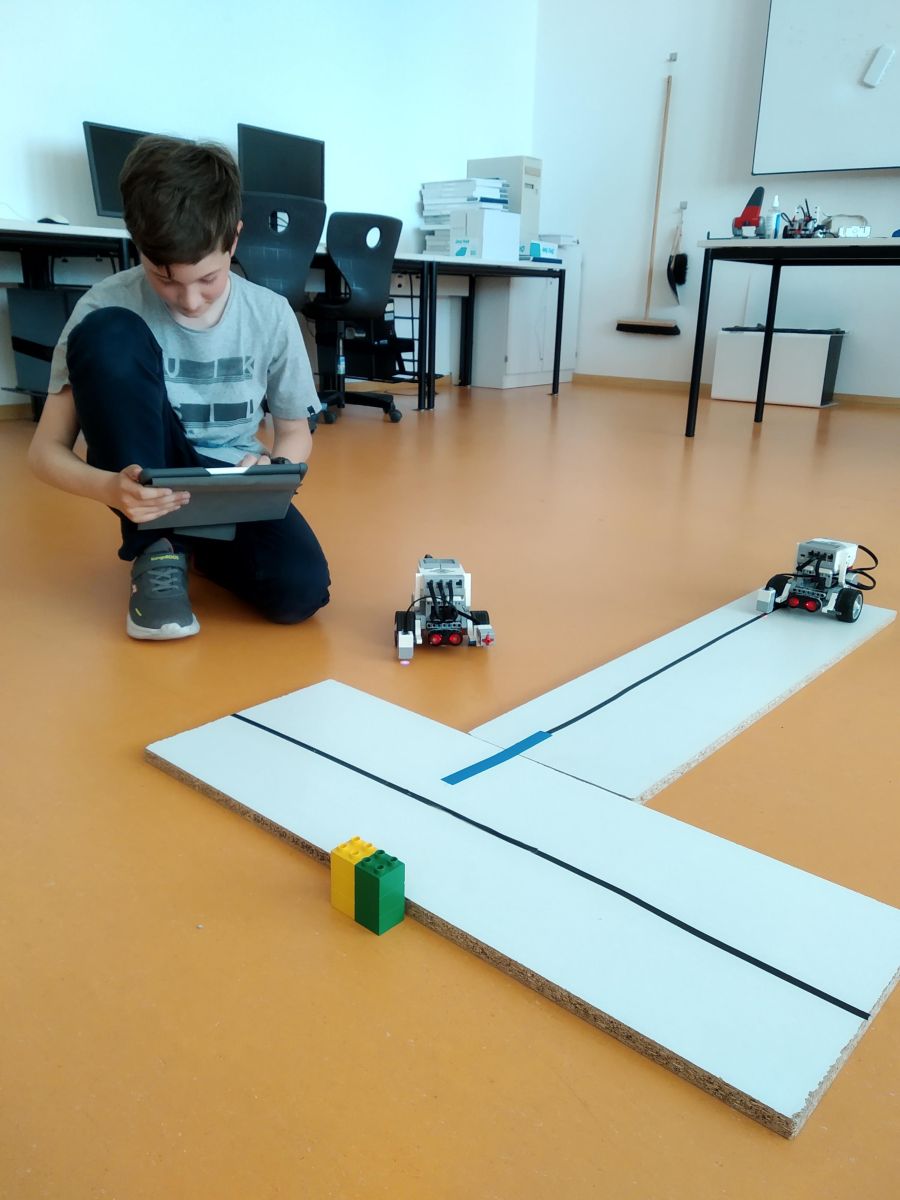
Der Roboter sollte nun mit Hilfe eines Ultraschallsenors erkennen - ähnlich zu den Abstandspiepsern in Autos - wann er sich der Kreuzung nähert. Die Häuserwand wurde symbolisiert durch die gelben und grünen Duplosteine (siehe Bild). Sobald der Ultraschallsensorwert eine Grenzwert unterschritten hat, sollte der Roboter auf Farberkennung umschalten und die Farbe einer Linie erkennen. Bei einer blauen Linie sollte er nach rechts und bei einer roten Linie nach links abbiegen. Danach sollte er wieder der Linie folgen.
Dadurch kamen eine Menge neue Herausforderungen auf die Teams zu, wie z. B.:
Welchen Schwellenwert legt man für den Ultraschallsensor fest? Wie erkennen wir die Farbe? Was können wir machen, wenn der Sensor nicht auf der farbigen Linie liegt? Wie programmieren wir die Fälle für den Abbiegevorgang?
Diese Fragen werden wir noch bis zum Ende des Schuljahres optimieren und dann in einen Wettbewerb herausfinden, welches Team seinen Roboter am besten gebaut und programmiert hat.
Stefan Karl und Michael Wunder